Intel Architecture Day 2021: Alder Lake, Golden Cove, and Gracemont Detailed
by Dr. Ian Cutress & Andrei Frumusanu on August 19, 2021 9:00 AM ESTIntel Thread Director
One of the biggest criticisms that I’ve levelled at the feet of Intel since it started talking about its hybrid processor architecture designs has been the ability to manage threads in an intelligent way. When you have two cores of different performance and efficiency points, either the processor or the operating system has to be cognizant of what goes where to get the best result from the end-user. This requires doing additional analysis on what is going on with each thread, especially new work that has never been before.
To date, most desktop operating systems operate on the assumption that all cores and the performance of everything in the system is equal. This changed slightly with simultaneous multithreading (SMT, or in Intel speak, HyperThreading), because now the system had double the threads, and these threads offered anywhere from zero to an extra 100% performance based on the workload. Schedulers were hacked a bit to identify primary and secondary threads on a core and schedule new work on separate cores. In mobile situations, the concept of an Energy Aware Scheduler (EAS) would look at the workload characteristics of a thread and based on the battery life/settings, try and schedule a workload where it made sense, particularly if it was a latency sensitive workload.
Mobile processors with Arm architecture designs have been tackling this topic for over a decade. Modern mobile processors now have three types of core inside – a super high performance core, regular high performance cores, and efficiency cores, normally in a 1+3+4 or 2+4+4 configuration. Each set of cores has its own optimal window for performance and power, and so it relies on the scheduler to absorb as much information as possible to determine the best way to do things.
Such an arrangement is rare in the desktop space - but now with Alder Lake, Intel has an SoC that has SMT performance cores and non-SMT efficient cores. With Alder Lake it gets a bit more complex, and the company has built a technology called Thread Director.
That’s Intel Thread Director. Not Intel Threat Detector, which is what I keep calling it all day, or Intel Threadripper, which I have also heard. Intel will use the acronym ITD or ITDT (Intel Thread Director Technology) in its marketing. Not to be confused with TDT, Intel’s Threat Detection Technology, of course.
Intel Threadripper Thread Director Technology
This new technology is a combined hardware/software solution that Intel has engineered with Microsoft focused on Windows 11. It all boils down to having the right functionality to help the operating system make decisions about where to put threads that require low latency vs threads that require high efficiency but are not time critical.
First you need a software scheduler that knows what it is doing. Intel stated that it has worked extensively with Microsoft to get what they want into Windows 11, and that Microsoft have gone above and beyond what Intel needed. This fundamental change is one reason why Windows 11 exists.
So it’s easy enough (now) to tell an operating system that different types of cores exist. Each one can have a respective performance and efficiency rating, and the operating system can migrate threads around as required. However the difference between Windows 10 and Windows 11 is how much information is available to the scheduler about what is running.
In previous versions of Windows, the scheduler had to rely on analysing the programs on its own, inferring performance requirements of a thread but with no real underlying understanding of what was happening. Windows 11 leverages new technology to understand different performance modes, instruction sets, and it also gets hints about which threads rate higher and which ones are worth demoting if a higher priority thread needs the performance.
Intel classifies the performance levels on Alder Lake in the following order:
- One thread per core on P-cores
- Only thread on E-cores
- SMT threads on P-cores
That means the system will load up one thread per P-core and all the E-cores before moving to the hyperthreads on the P-cores.
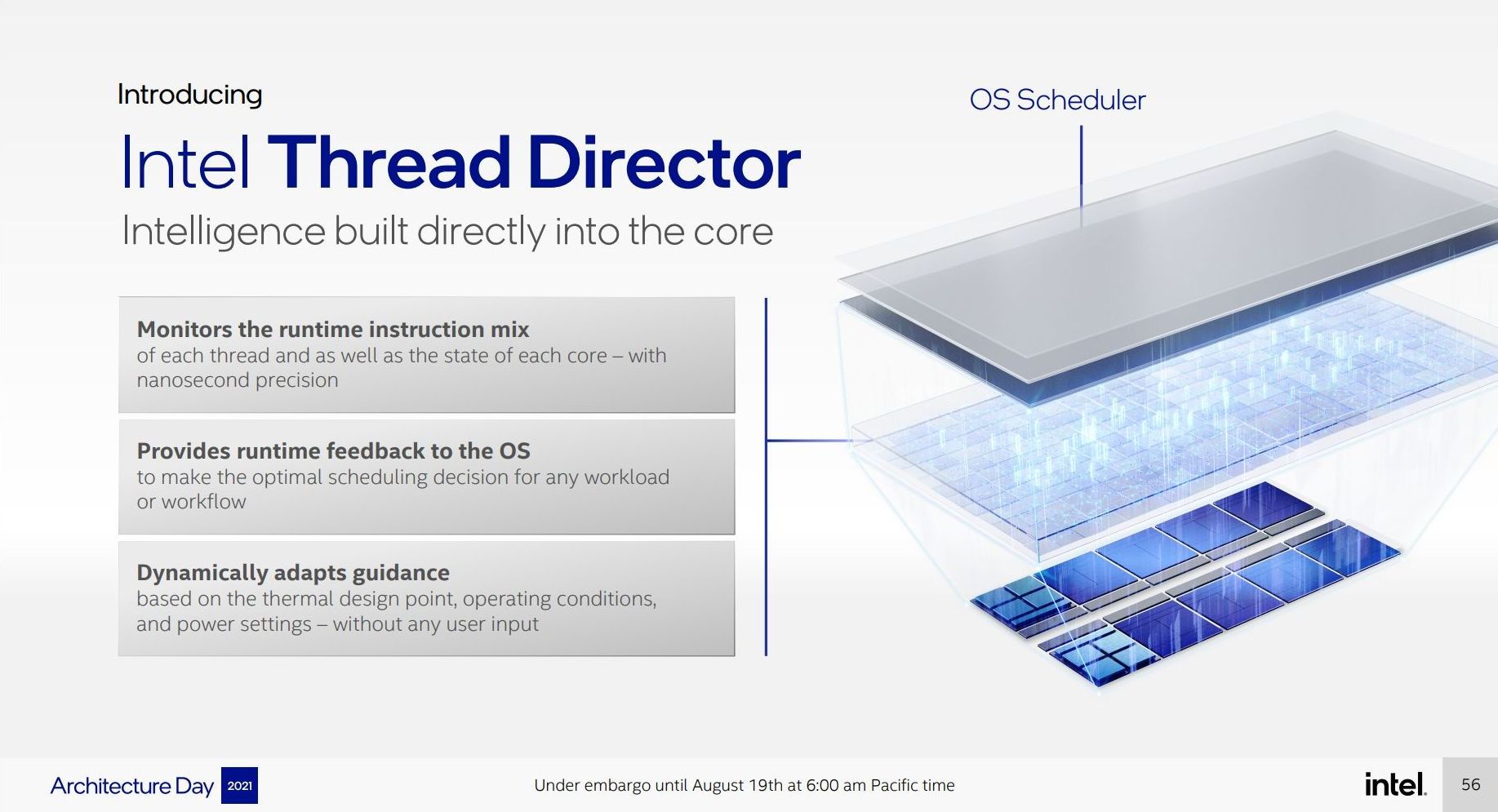
Intel’s Thread Director controller puts an embedded microcontroller inside the processor such that it can monitor what each thread is doing and what it needs out of its performance metrics. It will look at the ratio of loads, stores, branches, average memory access times, patterns, and types of instructions. It then provides suggested hints back to the Windows 11 OS scheduler about what the thread is doing, whether it is important or not, and it is up to the OS scheduler to combine that with other information about the system as to where that thread should go. Ultimately the OS is both topologically aware and now workload aware to a much higher degree.
Inside the microcontroller as part of Thread Director, it monitors which instructions are power hungry, such as AVX-VNNI (for machine learning) or other AVX2 commands that often draw high power, and put a big flag on those for the OS for prioritization. It also looks at other threads in the system and if a thread needs to be demoted, either due to not having enough free P-cores or for power/thermal reasons, it will give hints to the OS as to which thread is best to move. Intel states that it can profile a thread in as little as 30 microseconds, whereas a traditional OS scheduler may take 100s of milliseconds to make the same conclusion (or the wrong one).
On top of this, Intel says that Thread Director can also optimize for frequency. If a thread is limited in a way other than frequency, it can detect this and reduce frequency, voltage, and power. This will help the mobile processors, and when asked Intel stated that it can change frequency now in microseconds rather than milliseconds.
We asked Intel about where an initial thread will go before the scheduling kicks in. I was told that a thread will initially get scheduled on a P-core unless they are full, then it goes to an E-core until the scheduler determines what the thread needs, then the OS can be guided to upgrade the thread. In power limited scenarios, such as being on battery, a thread may start on the E-core anyway even if the P-cores are free.
For users looking for more information about Thread Director on a technical, I suggest reading this document and going to page 185, reading about EHFI – Enhanced Hardware Frequency Interface. It outlines the different classes of performance as part of the hardware part of Thread Director.
It’s important to understand that for the desktop processor with 8 P-cores and 8 E-cores, if there was a 16-thread workload then it will be scheduled across all 8 P-cores with 8 threads, then all 8 E-cores with the other 8 threads. This affords more performance than enabling the hyperthreads on the P-cores, and so software that compares thread-to-thread loading (such as the latest 3DMark CPU Profile test) may be testing something different compared to processors without E-cores.
On the question of Linux, Intel only went as far to say that Windows 11 was the priority, and they’re working upstreaming a variety of features in the Linux kernel but it will take time. An Intel spokesperson said more details closer to product launch, however these things will take a while, perhaps months and years, to get to a state that could be feature-parity equivalent with Windows 11.
One of the biggest questions users will ask is about the difference in performance or battery between Windows 10 and Windows 11. Windows 10 does not get Thread Director, but relies on a more basic version of Intel’s Hardware Guided Scheduling (HGS). In our conversations with Intel, they were cagy to put any exact performance differential metrics between the two, however based on understanding of the technology, we should expect to see better frequency efficiency in Windows 11. Intel stated that even though the new technology in Windows 11 will mean threads will move more often than in Windows 10, potentially adding latency, in their testing it wasn’t in any way human perceivable. Ultimately because the Win11 configuration can also optimize for power and efficiency, especially in mobile, Intel puts the win on Windows 11.
The only question is if Windows 11 will launch in time for Alder Lake.








223 Comments
View All Comments
name99 - Thursday, August 19, 2021 - link
"Intel’s Thread Director controller puts an embedded microcontroller inside the processor such that it can monitor what each thread is doing and what it needs out of its performance metrics. It will look at the ratio of loads, stores, branches, average memory access times, patterns, and types of instructions."People might be interested to know that Apple has done this for years (I don't know about ARM).
The Apple scheme has many moving parts but these include
- tracking how much work is done by Fetch, Decode and Execute. The first two can estimate based on number of instructions, the third takes account of the type of instruction.
- the scheme is even sophisticated enough (at least the patent talks about this) that the weights given to each of these pieces are variable to match the characteristics of the manufactured chip. Each SoC is tested and the precise weights are fused into the chip after testing.
- this mean that the SoC can calculate things like instantaneous power usage. This is used at the overall SoC level (to limit battery current draw) and at the per execution unit level (eg to halt the SIMD pipeline for a cycle every few cycles if some thermal pr power constraint is being exceeded). You will notice this is the equivalent of Intel's frequency throttling for AVX512, but much nicer because it is done on demand, purely to the level needed, and without slowing down the rest of the core or without a slow transition between faster and slower frequencies.
- there is also tracking of where L1 cache fills comes from. If a lot come from the E cores, the E-core frequency is boosted. If a lot come from DRAM, then the fabric frequency and DRAM frequency are boosted.
- behind everything, for *most purposes* the primary metric is nJ/instruction. The scheduler does many things in the obvious way you would expect (background threads on E cores, track progress vs deadline and ramp core performance up or down depending on how that is doing); but some non-obvious things are that code that is inefficient (ie nJ/instruction is too low) and that is not otherwise protected by the OS will be pushed to lower frequency or to an E-core. This might sound bad, but mainly what it's saying is
+ if you're constantly waiting on DRAM, then running the core at high frequency does you no good anyway
+ if you're not running very wide (hard to predict branches, or long dependency chains) you can't take advantage of the big core anyway, so why waste power keeping you there?
Presumably Intel's scheme at least covers all these sorts of bases.
One complication Apple has, that I assume Intel/Windows will not have (but it's not clear) is the use of clustering. Clustering sounds great, as does that huge low latency shared cache. But it comes at the cost of, as far as I can tell, a common frequency for the entire cluster. (If CPUs were at different frequencies, there'd have to be a cross-frequency-domain stage when communicating with the shared L2, at that would add noticeable latency).
So the OS scheduler doesn't just have the job of scheduling each thread to the optimal core at optimal DVFS, it also has to pack 4 optimal [as a unit] threads to a cluster...
I can't tell if Intel's scheme runs their small cores that way, as a cluster of 4 sharing an L2 (and thus sharing frequency). If so, how the OS scheduler handles this is something to keep an eye on for both Windows and Linux.
BTW there are very recently published patents that suggest Apple may be moving away from this, to a scheme of private L2s and a shared per-cluster L3!
https://patents.google.com/patent/US10942850B2
That's something to keep an eye on for the A15 and M2...
mode_13h - Friday, August 20, 2021 - link
Thanks for the info.What do you mean by "nJ/instruction" ? Is that the ratio of branches vs. non-branch instructions? If not, then what does it have to do with DRAM latency? Or was that a reference to the prior paragraph?
Where do you read this stuff?
name99 - Friday, August 20, 2021 - link
nanoJoules/instruction. ie energy per instructionThis info is acquired from reading massive numbers of Apple patents, validated as much as possible by experiments run on M1.
mode_13h - Saturday, August 21, 2021 - link
Wow. My eyes glaze over, trying to read patents. I'm sure there are better and worse ones, but they're often written in ways that drain the joy out of the most interesting ideas.Thanks for sharing!
jospoortvliet - Sunday, August 22, 2021 - link
Indeed super interesting!mode_13h - Thursday, August 19, 2021 - link
I wonder if they did anything to the decoder around SMT or multiple instruction streams. In Tremont, it seemed like they way they used a 6-wide decoder was as two 3-wide decoders, where each would work on a separate branch target.> the L2 BTB (branch target buffer) has grown to well over double with the
> structure increased from 5K entries to 12K entries
Can someone refresh us on the function of a BTB? Is it like a cache that stores the target address of each recent branch instruction, so that speculative execution doesn't have to wait for the target to be computed (if not a fixed target)?
> actually eliminating instructions that otherwise would have to actually
> emitted to the back-end execution resources.
Huh? Seems like an editing error. Can anyone elaborate?
> Intel still continues to use merged execution port / reservation station design
Someone please remind us what a reservation station is?
> On the integer side of things, there’s now a fifth execution port and pipeline with
> simple ALU and LEA capabilities
In this case, I presume LEA means "load effective address" and is used to compute memory addresses (potentially involving a multiply, an add, a constant offset?). Is that correct? And does the above statement mean that each of those ports can do simple ALU *or* LEA operations?
> Intel has improved the prefetchers
Yes, and the article text didn't even mention the bullet point in the slide about feedback-based prefetch-throttling! I'm reminded of how ARM's N2 can throttle back prefetching, during periods of memory contention. Perhaps Intel came to the same conclusion that overzealous prefetchers can starve cores running memory-intensive routines, in highly-threaded workloads.
> full-line-write predictive bandwidth optimisation ... where the core can greatly improve
> bandwidth by avoiding RFO reads of cache lines that are going to be fully rewritten
Yes, I've been wanting this for about 2 decades.
> We can see in the graph ... low outliers where the new design doesn’t improve thing
> much or even sees regressions, which is odd.
Maybe those were affected by the disabling of AVX-512? Or were those benchmarks performed on a fully-enabled core?
> +25% wider µOP output
If this is referring to expanding uOP cache outputs from 6 -> 8, that's a 33% improvement!
name99 - Thursday, August 19, 2021 - link
"Can someone refresh us on the function of a BTB? "It's hard to be sure because I can never tell the extent to which Intel is doing things the old comfortable way, or the most sensible new way. I'll tell you what Apple do.
Intel are presumably a subset of these features, but I don't know how good a subset. You need ALL the pieces to run sustained "random" code 8-wide as Apple does.
(a) You want a predictor for indirect branches (think things like virtual function or procPtr calls). How to construct such a predictor is interesting but we will just assume it exists. This may have been what the original Branch Target Buffer was say in the early 1990s, but it is NOT what we have in mind today.
(b) To run a modern wide OoO machine optimally, you want to be able to process a TAKEN branch per cycle. (Code has a branch every ~6 instructions, a taken branch every ~10 instructions. If you want to run 8 wide...)
- This means you need to pull a new run of instructions (ie loaded from a new address) every cycle.
- This, in turn, means that you really need to run Fetch as an asynchronous process. A Fetch Engine every cycle predicts the next Fetch Address and the number of instructions to Fetch. (On Apple this can be at least as wide as 16 instructions in one cycle if everything lines up correctly.) These instructions are placed in the Fetch Queue and at the other end Decode reads 8/cycle from this queue. Making Fetch async from the rest of the machine means that you can sometimes pull in 16 instructions into the queue, sometimes you just pull in three or four instructions, sometimes none while you wait for a cache miss. But hopefully the queue between Fetch and Decode buffers much of this variation.
- BUT asynchronous Fetch means Fetch is on its own regarding how it proceeds. Basically what you want is
+ a very fast (single cycle!) Next Fetch Predictor that produces the next fetch address and (ideally) also a Fetch Width
But a fast such predictor is of limited accuracy.
So the second essential you need is very high quality predictors that correct the Next Fetch Predictor. As long as you correct a misFetch before the instruction stream hits Rename life is fairly easy. Correcting after Rename is tough (you have to undo resource allocations), correcting after Issue is hopeless and you have to flush.
The Apple numbers are that their high quality predictors (Branch Prediction and Indirect Branch Prediction) are TAGE based, phenomenally accurate, and take up to 5 cycles to generate a result. That just works out (of course!)
So the idea is that the Next Fetch Predictor generates a stream of Fetch's which results in a stream of, let's call them cars of instructions, proceeding from I-cache, through the Fetch Queue, through Decode. At any point one of the better quality predictors can step in and derail all the cars after a certain point, so that Fetch restarts. Obviously this isn't great, you've lost up to five cycles of work, but it's a lot better than a full machine flush!
OK, within this framework, I believe that what Intel today calls the BTB is essentially doing the same job as what I am calling the Next Fetch Predictor.
BTW there are an insane number of tweaks and improvement Apple have made to the above scheme over the years. These include
- a separate Return stack used by the Next Fetch predictor to deal with extremely rapid call/return pairs (eg call, work, return is three cycles; all done before the code has even hit decode, so totally out of sync with the "full accuracy" Return stack)
- Decode (ie the earliest stage possible) does what it can to keep the machinery on track. Decode detects any sort of mismatch between decoded branches and the next car of instructions and, if so, gets Fetch to resteer. This is easily done for unconditional branches, and can also be done for a few other weird cases (like some mismatched call/return pairs). Decode also updates the Return stack.
- pre-decode (ie when an instruction line is moved from l2 to L1) does a bunch of stuff to mark significant points (eg where branches are) in a cache line. This in turn is referenced the first time the Next Fetch Predictor encounters these new lines.
- for certain cases (most obviously when the Next Fetch Predictor has an indirect branch marked as low confidence) Fetch pauses until some of the upstream machinery can suggest an address. The idea is that for low confidence indirect branches, you're so unlikely to guess correctly why even waste energy trying?
Apart from all these, theres a whole other set of machinery that handles loops and the transition from "random" code to loops. These include both an L0 cache and a trace cache. (That's right kids, a trace cache!)
There's also a whole set of ideas for saving power at every stage of this process. For example the Next Fetch Predictor, along with the obvious things it is recording (next fetch address, and fetch width) also records two items obvious in retrospect -- the physical address (so no TLB lookup necessary) and even the cache way (so no way prediction necessary, and the correct way -- and only that way) can be fired up on cache access. The loop buffer, L0, and the trace cache are additional ways to run Fetch on energy fumes for code that meets the specific requirements, so that various of TLB, way prediction, multi-way lookup, branch predictor, etc etc can all be powered down.
mode_13h - Friday, August 20, 2021 - link
Thanks for the info. I wonder where you find such detailed descriptions!> L0 cache
Just another name for a uop cache?
> That's right kids, a trace cache!
So, a trace cache stores an entire string of instructions, even across one or more branches? Does it hold instructions before or after decode?
> and even the cache way
You mean the cache set?
> The loop buffer
What's a loop buffer? Sort of like a trace cache, for loops?
name99 - Friday, August 20, 2021 - link
Think of the steps required to run normal code, as I described above. The consider various simple loops.Suppose you have a straight line loop, say 40 instructions in the loop body, no branches. Then you can omit branch prediction, TLB, cache -- just repeatedly run the same code from a straight buffer. That's essentially a loop buffer.
Now suppose that your loop body has a few branches in it, but they are predictable, maybe something like
if(loop counter even){path1} else {path2}
Now what you want is something like a trace cache that's holding the two paths path1 and path2, and a very simple predictor that's telling which of these to choose each iteration. You can still avoid the costs of a real branch predictor and a real cache.
Now suppose you have a loop with moderately complicated branches, not terrible but not that easy to predict either. You can't avoid the cost of branch prediction now (as I said, to validate the guess of the Next Fetch Predictor) but you can avoid much of the cost of the cache by moving the loop body into an L0 cache which will be essentially a small direct-mapped cache. Being smaller, and direct-mapped, it will use less energy/access than the full I-cache. (And you probably will also access it virtually rather than physically, so also avoid TLB costs.)
cache way:
Recall that a DIRECT-MAPPED cache has only a single place where a line can go -- grab some bits from the middle of an address, they define an index, the line goes at that index. This is fast and cheap, but means you have a problem if you frequently want to access two addresses with the same index (ie same middle bits in their addresses).
n-way set-associative cache means you now have, n (may be 2, 4, 8 or some other number) of slots associated with a given index. So if you have 8 slots, you can hold 8 lines with that same index, ie 8 addresses with those same middle bits.
BUT how do you know WHICH of those 8 lines you want? Ahh.
That gets into the business of matching tags, way prediction and a whole mess of other stuff that you need to read in a textbook. But the relevance to what I was saying is that which of these 8 possible lines is of interest is called a WAY. So by storing the cache way, you can access a cache with the speed (avoid cache tag lookup) and energy (no need to precharge the tags) of a direct-mapped cache.
GeoffreyA - Saturday, August 21, 2021 - link
Great information. I believe on the Intel side, Nehalem added something like that, the LSD.